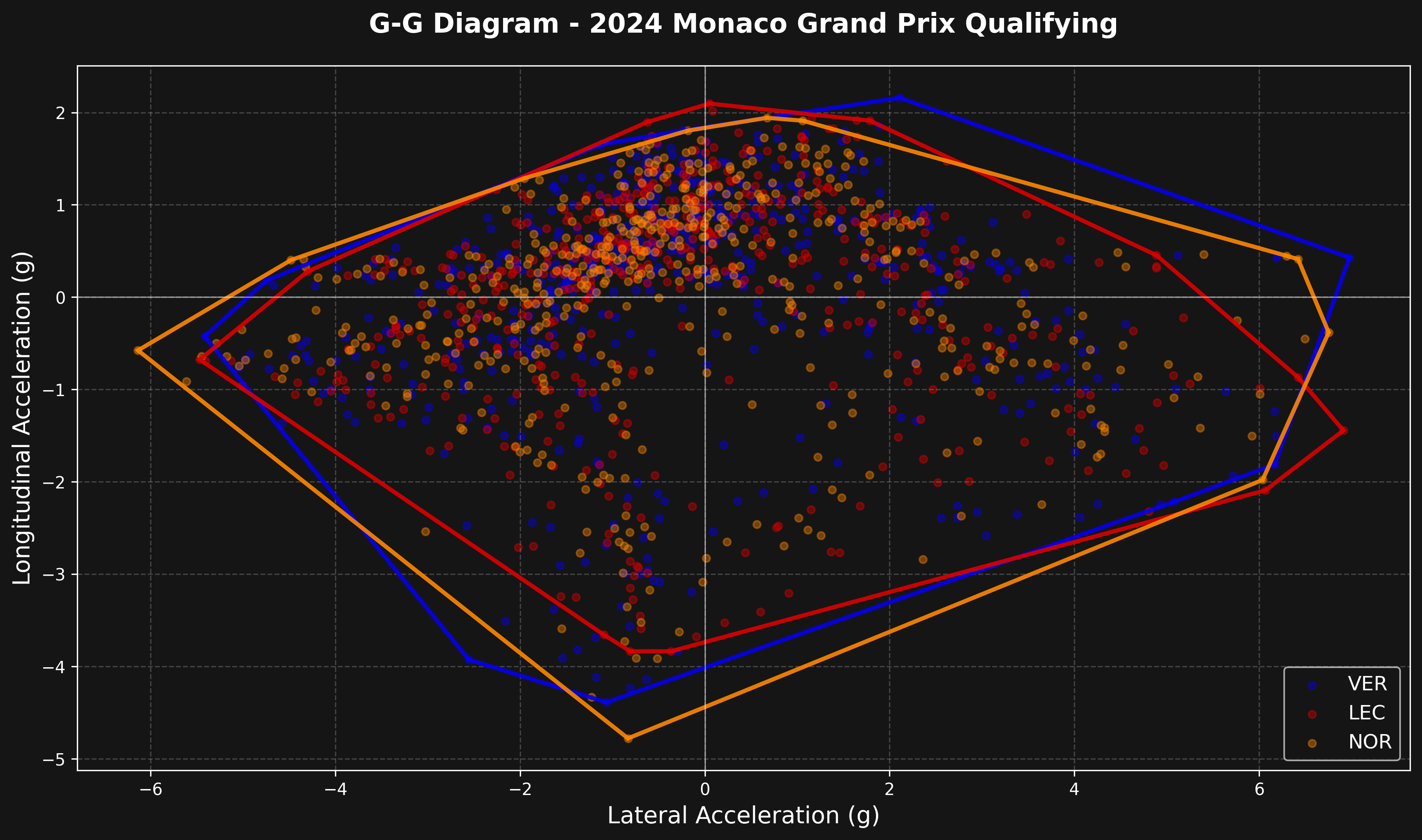
A G-G diagram plots lateral vs longitudinal acceleration, showing the performance envelope of a car. The outer boundary represents the maximum grip available - it’s one of the most insightful ways to compare car performance and driver technique.
What is a G-G diagram?
The G-G diagram shows:
- X-axis: Lateral acceleration (cornering forces)
- Y-axis: Longitudinal acceleration (braking/accelerating forces)
- Each point represents a moment in time during the lap
- The outer boundary shows the car’s performance limit
Load session and get telemetry
We’ll compare multiple drivers at Monaco Qualifying.
import math
import matplotlib.pyplot as plt
import numpy as np
from scipy.spatial import ConvexHull
import tif1
from tif1.plotting import get_team_color, setup_mpl
# Setup plotting
setup_mpl(color_scheme="fastf1")
# Load session
session = tif1.get_session(2024, "Monaco", "Q")
laps = session.laps
# Select drivers to compare
drivers = ["VER", "LEC", "NOR"]
Compute accelerations
Calculate g-forces from telemetry data using smooth derivatives to reduce noise.
The smooth_derivative() function uses a low-noise differentiator algorithm that reduces noise in the acceleration calculations. This is important because raw numerical derivatives amplify noise in the telemetry data, which would create unrealistic spikes in the G-G diagram.
def smooth_derivative(t_in, v_in):
"""Compute smooth derivative using low-noise differentiators."""
t = t_in.copy()
v = v_in.copy()
# Transform time to seconds
try:
for i in range(0, t.size):
t.iloc[i] = t.iloc[i].total_seconds()
except Exception:
pass
t = np.array(t)
v = np.array(v)
dvdt = np.zeros(t.size)
# Manually compute boundary points
dvdt[0] = (v[1] - v[0]) / (t[1] - t[0])
dvdt[1] = (v[2] - v[0]) / (t[2] - t[0])
dvdt[2] = (v[3] - v[1]) / (t[3] - t[1])
n = t.size
dvdt[n - 1] = (v[n - 1] - v[n - 2]) / (t[n - 1] - t[n - 2])
dvdt[n - 2] = (v[n - 1] - v[n - 3]) / (t[n - 1] - t[n - 3])
dvdt[n - 3] = (v[n - 2] - v[n - 4]) / (t[n - 2] - t[n - 4])
# Compute interior points with smooth method
c = [5.0 / 32.0, 4.0 / 32.0, 1.0 / 32.0]
for i in range(3, t.size - 3):
for j in range(1, 4):
dvdt[i] += 2 * j * c[j - 1] * (v[i + j] - v[i - j]) / (t[i + j] - t[i - j])
return dvdt
def truncated_remainder(dividend, divisor):
"""Calculate truncated remainder."""
divided_number = dividend / divisor
divided_number = -int(-divided_number) if divided_number < 0 else int(divided_number)
remainder = dividend - divisor * divided_number
return remainder
def transform_to_pipi(input_angle):
"""Transform angle to [-pi, pi] range."""
pi = math.pi
revolutions = int((input_angle + np.sign(input_angle) * pi) / (2 * pi))
p1 = truncated_remainder(input_angle + np.sign(input_angle) * pi, 2 * pi)
p2 = (
np.sign(
np.sign(input_angle)
+ 2 * (np.sign(math.fabs((truncated_remainder(input_angle + pi, 2 * pi)) / (2 * pi))) - 1)
)
* pi
)
output_angle = p1 - p2
return output_angle, revolutions
def remove_acceleration_outliers(acc):
"""Remove unrealistic acceleration values (> 7.5g)."""
acc_threshold_g = 7.5
if math.fabs(acc[0]) > acc_threshold_g:
acc[0] = 0.0
for i in range(1, acc.size - 1):
if math.fabs(acc[i]) > acc_threshold_g:
acc[i] = acc[i - 1]
if math.fabs(acc[-1]) > acc_threshold_g:
acc[-1] = acc[-2]
return acc
def compute_accelerations(telemetry):
"""Calculate longitudinal and lateral accelerations in g using smooth derivatives."""
# Longitudinal acceleration from speed change
v = np.array(telemetry["Speed"]) / 3.6
lon_acc = smooth_derivative(telemetry["Time"], v) / 9.81
# Lateral acceleration from track curvature
dx = smooth_derivative(telemetry["Distance"], telemetry["X"])
dy = smooth_derivative(telemetry["Distance"], telemetry["Y"])
# Calculate heading angle
theta = np.zeros(dx.size)
theta[0] = math.atan2(dy[0], dx[0])
for i in range(0, dx.size):
theta[i] = theta[i - 1] + transform_to_pipi(math.atan2(dy[i], dx[i]) - theta[i - 1])[0]
# Curvature is rate of change of heading
kappa = smooth_derivative(telemetry["Distance"], theta)
lat_acc = v * v * kappa / 9.81
# Remove outliers
lon_acc = remove_acceleration_outliers(lon_acc)
lat_acc = remove_acceleration_outliers(lat_acc)
return lon_acc, lat_acc
Create G-G diagram
Plot acceleration data with performance envelope using convex hull.
The performance envelope is computed using scipy.spatial.ConvexHull, which finds the smallest convex polygon that contains all acceleration points. This accurately represents the car’s performance limits across all directions of acceleration.
fig, ax = plt.subplots(figsize=(12, 12))
for driver in drivers:
try:
# Get fastest lap telemetry
driver_lap = laps.pick_driver(driver).pick_fastest()
telemetry = driver_lap.get_telemetry().add_distance()
# Compute accelerations
lon_acc, lat_acc = compute_accelerations(telemetry)
# Get team color
try:
team = driver_lap["Team"] if "Team" in driver_lap.index else None
color = get_team_color(team) if team else None
except Exception:
color = None
if color is None:
# Fallback colors
color_map = {"VER": "#0600ef", "LEC": "#dc0000", "NOR": "#ff8700"}
color = color_map.get(driver, "#ffffff")
# Plot scatter points
ax.scatter(
lat_acc,
lon_acc,
s=20,
alpha=0.4,
color=color,
label=driver,
)
# Draw performance envelope using ConvexHull
points = np.column_stack([lat_acc, lon_acc])
points = points[~np.isnan(points).any(axis=1)]
if len(points) > 3:
try:
hull = ConvexHull(points)
# Plot the convex hull edges
for simplex in hull.simplices:
ax.plot(
points[simplex, 0],
points[simplex, 1],
color=color,
linewidth=2.5,
alpha=0.9,
)
except Exception as hull_error:
print(f"Warning: Could not compute convex hull for {driver}: {hull_error}")
continue
except Exception as e:
print(f"Warning: Could not process {driver}: {e}")
continue
# Styling
ax.set_xlabel("Lateral Acceleration (g)", fontsize=14)
ax.set_ylabel("Longitudinal Acceleration (g)", fontsize=14)
ax.set_title(
f"G-G Diagram - {session.event.year} {session.event['EventName']} {session.name}",
fontsize=16,
fontweight="bold",
pad=20,
)
# Add grid and axis lines
ax.grid(True, alpha=0.3, linestyle="--")
ax.axhline(0, color="white", linestyle="-", alpha=0.5, linewidth=0.8)
ax.axvline(0, color="white", linestyle="-", alpha=0.5, linewidth=0.8)
# Set equal aspect ratio for proper g-force visualization
ax.set_aspect("equal")
# Legend
ax.legend(loc="lower right", fontsize=12)
plt.tight_layout()
plt.show()
Reading the diagram
Key insights from a G-G diagram:
- Top of envelope (positive Y): Maximum acceleration
- Bottom of envelope (negative Y): Maximum braking
- Left/right edges (X): Maximum cornering forces
- Corners of envelope: Combined braking/acceleration + cornering
- Wider envelope: More grip available
- Rounder envelope: Better balanced car
Comparing drivers
Look for:
- Envelope size: Larger = more grip being used
- Envelope shape: Asymmetry shows car balance issues
- Point density: Where drivers spend most time
- Peak values: Maximum g-forces achieved
Track characteristics
Different tracks produce different shapes:
- Monaco: Smaller envelope, lower speeds, less extreme forces
- Monza: Larger longitudinal values (high-speed braking)
- Silverstone: Large lateral values (high-speed corners)
The G-G diagram is a powerful tool for understanding car performance limits and how drivers extract maximum grip from the car.